► Event Background and Objectives
On September 20, 2025, the "Humanoid Robotics Workshop: Efficient Whole-Body Control—Embodiment, Redirection, Training, and Sim2Real," hosted by High Torque Robotics, co-organized by the Tsinghua University Student Entrepreneurship Association, and supported by Tongfang Technology Co., Ltd., was successfully held at Tsinghua Tongfang Technology Plaza.
Humanoid robot motion control has achieved remarkable progress, evolving from initial locomotion capabilities to today's whole-body control. While robots have surpassed most humans in certain motor skills, their integrated perception and movement abilities still fall far short of human levels. Driven by the vision of enabling humanoid robots to achieve more generalized perception-motion capabilities and ultimately enter households, we have visited numerous top-tier research institutions and experts worldwide since March. While there is widespread optimism about this promising future, diverse perspectives and approaches exist regarding the technical pathways. It is for this purpose that we organized this workshop — to facilitate focused discussions in a more efficient manner, promote exchange and collaboration, and collectively advance humanoid robots toward generalized perception and movement capabilities.
The event gathered prestigious speakers and roundtable guests from academia and industry, including Dr. Yanjie Ze from Stanford University; Ziang Zheng, graduate student at Tsinghua University's School of Vehicles and Mobility; Ziwen Zhuang, PhD candidate at Tsinghua University's Institute for Interdisciplinary Information Sciences; Zhi Su, senior student from Tsinghua University's Yao Class; Taixian Hou, PhD candidate at Fudan University's School of Intelligent Robotics and Advanced Manufacturing Innovation; Gang Ding, PhD in Computer Science from Peking University; and David Zhang, Founder and CEO of High Torque Robotics. Ultimately, the event brought together over a hundred outstanding developers from academia and industry for meaningful exchange.

"Humanoid Robotics Workshop" Kicks Off
► Event Content and Technical Highlights
1. Theoretical Sharing
Presentation 1: Yanjie Ze — GMR (General Motion Retargeting)
Yanjie Ze
Ph.D. in Computer Science, Stanford University
Focuses on humanoid robotics and general embodied intelligence. Representative works include TWIST, GMR, DP3, and iDP3.
Dr. Yanjie Ze, emphasizing that "robots must possess both human-like appearance and human-like movements," identified GMR technology as key to achieving this goal. He pointed out that the academic framework for humanoid robot motion control has now converged: based on human motion data, kinematic-compliant robot data is obtained through motion retargeting, followed by simulation training to transfer motions to physical robots. The effectiveness of this pipeline heavily depends on the quality of retargeting.

Dr. Yanjie Ze Shares GMR Research
Addressing the three major pain points in current motion retargeting — "Not Human-Like, Not Real-Time, and Not General" — GMR simultaneously resolves these issues through three key designs: "human-robot Cartesian space alignment," "non-uniform local scaling of human data," and "two-stage inverse kinematics (IK)." It currently stands as the highest-performing motion retargeting solution among open-source algorithms. Moreover, GMR now supports GVHMR, which can output global human poses from human videos and convert them for humanoid robots, providing GMR with a more flexible source of motion data.
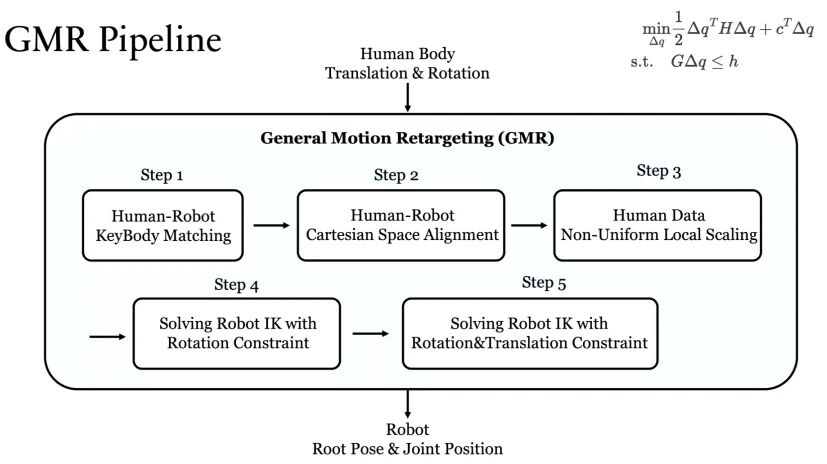
GMR Pipeline
Presentation 2: Ziang Zheng — TrackerLab: A Modular Toolkit for Whole-Body Control with Trajectory Priors
Ziang Zheng
Graduate Student, School of Vehicle and Mobility, Department of Mechanical Engineering, Tsinghua University
Research focuses on safe reinforcement learning for quadruped and humanoid robot control. Key contributions include L3P, JumpER, and TrackerLab.
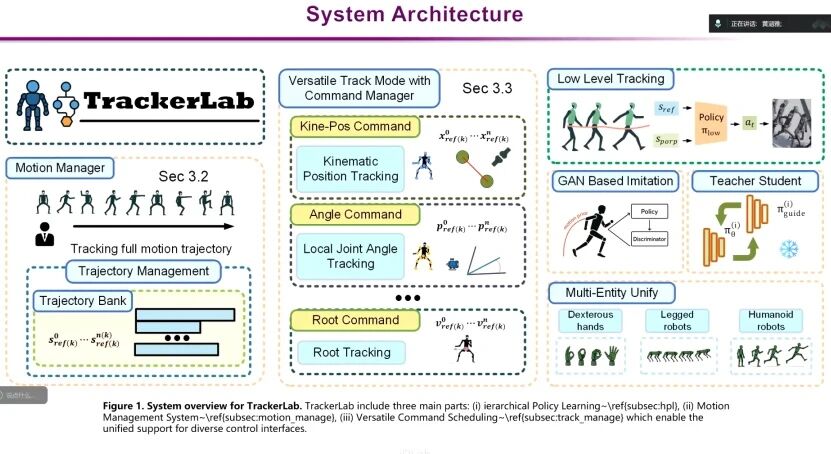
Ziang Zheng focuses on addressing key issues in current robot motion control development through the TrackerLab toolkit: fragmented experimental processes (requiring repeated pipeline setup), significant disparities in codebases (making algorithm comparison and result reproducibility difficult), and the lack of a unified underlying architecture in existing methods (such as AMP and BeyondMimic frameworks).

Ziang Zheng Explains TrackerLab: A Modular Whole-Body Control Package Based on Trajectory Priors
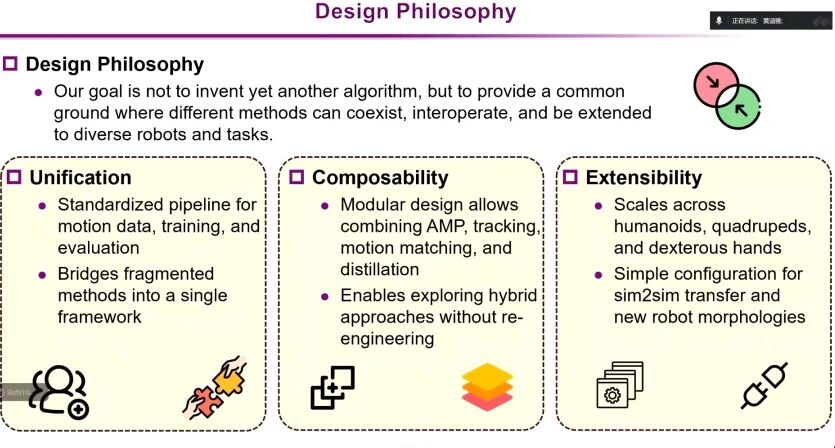
To address this issue, TrackerLab has established a unified, modular full-body control pipeline with three core characteristics:
1. Uniformity:
By standardizing motion data processing, model training, and performance evaluation workflows, it integrates fragmented control methods to resolve challenges in comparison and reproducibility.
2. Composability:
It supports flexible combination of modules such as AMP, Trajectory Tracking, Motion Matching, and Knowledge Distillation, enabling exploration of hybrid control solutions without code refactoring.
3. Extensibility:
Adaptable to humanoid robots, quadruped robots, dexterous hands, and other forms, enabling simulation environment migration or new hardware integration through simple configuration.
TrackerLab Core Features
Presentation 3: Ziwen Zhuang — Deployable Athletic Intelligence: A Perception-Driven Whole-Body Motion Control System
Ziwen Zhuang
PhD Candidate at Tsinghua University's Institute for Interdisciplinary Information Sciences
Former Research Assistant at Shanghai Qizhi Institute. Research focuses on robotic motion intelligence and deployable learning algorithms for legged robots, encompassing full-stack hardware and software technology development. Published "Robot Parkour Learning" and was a finalist for the CoRL 2023 Best System Paper Award.
Dr. Ziwen Zhuang first clarified the distinction between "Athletic Intelligence" and "Embodied Intelligence": the former focuses on enabling robots to "work efficiently" (enhancing movement speed and dynamic response), which is key to practical application; the latter emphasizes comprehensive environmental interaction. Citing Boston Dynamics as an example, he pointed out that deep learning can complete the "perception-motion control" loop, addressing the issue of traditional perception's inability to update environmental states in real time.

Dr. Ziwen Zhuang's Introduction to Intelligent Motion Control Systems
Dr. Zhuang's work centers on "perception-driven motion control," developing a real-time response system based on depth maps that has been adapted to various robot forms. For quadruped robots, the "Soft Constraint + Distillation" framework combined with GRU modules enables breakthrough cross-terrain traversability. For humanoid robots, Curriculum Learning replaces soft constraints to avoid reward hacking, while the "single-network multi-terrain adaptation with retained underlying balance capability" significantly improves training efficiency. Regarding Sim2Real implementation, Dr. Zhuang proposes that "depth maps are currently the most suitable for perception-based motion control in engineering practice" — they are easier to simulate than RGB data, low resolution suffices for distance judgment, and matching noise distributions can partially address perception transfer issues. He ultimately summarizes three key practical insights: pragmatic sensor selection (prioritizing depth maps), universal system architecture (common base layer + specialized perception), and training adapted to robot characteristics (avoiding blind imitation of human logic).
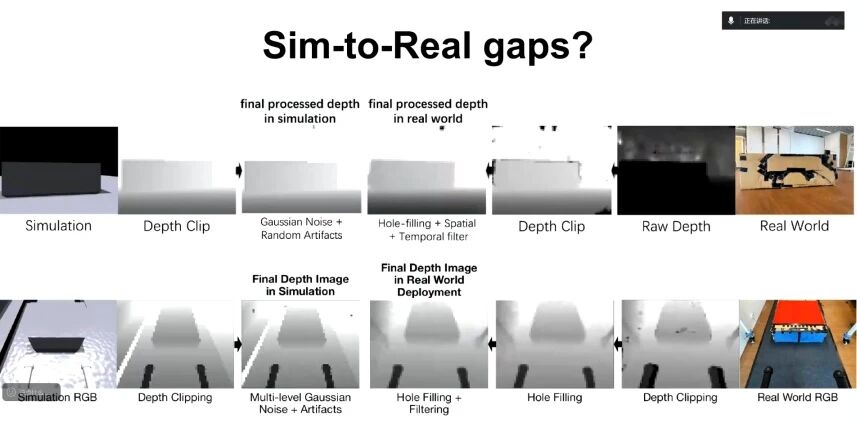
Sim2Real Layer Comparison
Presentation 4: David Zhang — Practices and Reflections on Robot Body Structure
David Zhang
Founder & CEO, High Torque Robotics
David Zhang, Founder & CEO of High Torque Robotics, shared insights on "Humanoid Robot Body Design," with a core vision of "enabling every developer to own a humanoid robot." The focus is on launching two compact and cost-effective hardware products: the 60cm Mini Pi plus and the 80cm Mini Hi.
The compact design of models like Mini Pi plus allows for single-person debugging, significantly reducing safety risks during motion testing and directly addressing the complexities and high risks associated with larger robots. The body design consistently adheres to the core principle that "performance, efficiency, cost, and safety are all indispensable," balancing both research and practical development needs.
In ensuring robotic embodiment performance, he identified four key principles through solution comparisons: Actuation prioritizes direct-drive motors, which offer structural simplicity, high efficiency, and low cost compared to hydraulic systems (transmitting force remotely but with low efficiency and high cost) and cable-driven mechanisms (flexible yet prone to wear and low maturity). Direct-drive motors are suitable for basic movements beyond high-degree-of-freedom dexterous hands; Density must balance "power density" (affecting dynamic response) and "freedom density" (determining motion flexibility) to avoid movement limitations; Gearbox selection adapts to scenarios, with planetary gearboxes becoming mainstream due to strong stability and engineering maturity; Motor optimization must avoid the misconception of "reducing cogging torque by enlarging the stator-rotor gap at the expense of efficiency," ensuring torque and efficiency balance through structural optimization.
In module design and selection, he emphasized "not relying solely on specifications": Module design should not blindly pursue torque and power density but must prioritize structural strength first, then optimize structural rationality, space utilization, and weight reduction, avoiding excessive hollowing that compromises durability. During selection, key parameters must be physically tested, including torque curves, response speed, module consistency, impact resistance, and over-temperature/over-current protection, to mitigate the risks of "inflated specifications."
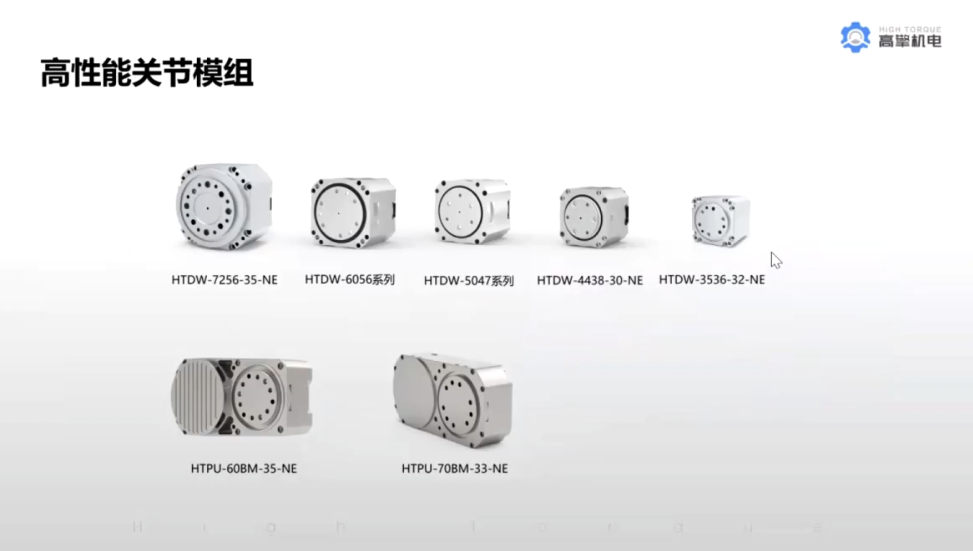
High Torque's High-Performance Joint Modules
He further emphasized that robotics development requires integrated solutions. Beyond core modules, it is essential to pair them with a main controller that ensures communication and computing power, batteries with safety protection (to mitigate fire risks), power management systems that prevent wire breakage and short circuits, and high-quality cables that reduce signal interference. This comprehensive setup enables developers to quickly build functional robots. Additionally, the compact modular design achieves "all-in-one research adaptability," allowing a single robot to cover motion control, manipulation, and full-body control needs, thereby lowering the barrier to entry for research.

High Torque's Integrated Robot Solutions & Control Modules
In the future, High Torque Robotics will focus on enabling robots to approach or even surpass human capabilities, with prioritized R&D in parallel structures (applied to shoulder, hip, and wrist joints to address the rigidity issues of serial structures) and dexterous hand development. The goal is to break the 20+ degrees of freedom limit for dexterous hands, achieving single-finger grip strength of 40–60 N, whole-hand grip strength of 200–600 N, and withstanding impact forces of 2,000–3,000 N to meet the safety and performance requirements of practical scenarios.

High Torque Robotics CEO David Zhang's Practical Insights
2. Roundtable Discussion
Theme: Future Directions and Technical Pathways for Robot Motion and Perception
This roundtable was moderated by David Zhang, Founder & CEO of High Torque Robotics, and featured four researchers: Dr. Ziwen Zhuang from Tsinghua University, Dr. Gang Ding from Peking University, Dr. Taixian Hou from Fudan University, and Zhi Su from Tsinghua University's Yao Class. The discussion revolved around five core questions.

The roundtable exchange proceeded successfully.
The logical structure of the roundtable discussion revolved around the core goal of "humanoid robots surpassing human capabilities and serving humanity," progressing step by step as follows: It began with "When can robots surpass human capabilities?" using dimensional and scenario-based analysis to forecast timelines; then extended the capability discussion to "Will robot motion perception technologies converge with human approaches?" exploring technical pathway choices; subsequently focused on implementation challenges by proposing "Exploration and difficulties in online motion learning algorithms," analyzing the relationship between physical robot iteration and foundation models; next addressed key commercial needs by discussing "Bottlenecks and breakthroughs in perception capabilities," deconstructing the synergy between perception, decision-making, and control; finally expanded to technical reuse by questioning "The possibility of cross-embodiment motion algorithms," studying the feasibility of general algorithms adapting to different robots. This formed a complete logical chain from goal prediction to pathway selection, implementation challenges, key capabilities, and technical reuse.
For detailed elaboration of viewpoints and the original text, please refer to the push notification:
Exclusive Roundtable | Future Directions and Technical Pathways for Robot Motion and Perception
► Summary
The Humanoid Robotics Workshop, centered on "Efficient Whole-Body Control," facilitated an end-to-end exchange from algorithmic exploration to engineering implementation through four in-depth technical sessions and one roundtable discussion. Moving forward, High Torque Robotics will continue to open its hardware platforms and technical communication channels, collaborating with more developers to advance humanoid robots from laboratories to commercial applications. We strive to achieve the goal of "enabling every developer to own a humanoid robot" and propel the industry toward the next phase of "closed-loop motion and perception."
In the future, High Torque Robotics will host more academic and developer exchange events. Beyond providing reliable hardware, we are committed to building a robust ecosystem platform for academic and development collaboration. Scholars and developers interested in cooperation and exchange are welcome to contact us via WeChat: dionysuslearning.