We started building robots in August 2020. At that time, we had not yet established a company, and I did not fully understand the required technology or division of labor for robotics.
However, I believed that since many people in China were developing robotic dogs—even individuals like SteerDog King and Deng Ge had succeeded—the technology was mature enough to advance toward humanoid robots.
I would like to thank Deng Ge, who agreed to collaborate on a wheel-legged robot. Working alone in a small room, he spent two months developing the first servo-based wheel-legged prototype.
(https://www.bilibili.com/video/BV1B3411t7eJ/)
This collaboration helped me understand the fundamental technical roles required: mechanical, hardware, embedded systems, and motion control. The performance of servo motors was poor, so I wanted to develop brushless modules myself. Deng Ge believed it was too difficult and later went abroad for further studies, while I continued the research. As it turned out, I had underestimated the challenge.
Previously, I worked in programmatic advertising, which had nothing to do with robotics. So, people often asked me why I wanted to build humanoid robots and what qualified me to do it.
My decision was based on reflections on the evolution of intelligence, observations about societal development, and reasoning about the overall technology of robotics. However, it wasn’t easy to explain. As an outsider and not an established expert, my words weren’t very convincing and could easily leave an impression of unreliability. So, I rarely talked about it. When asked, I would just say: It’s a hobby, something I do for fun. I believed that once we actually built it, people would naturally believe.
Now, we have developed our own products and are bringing them to the market. Additionally, we need to recruit more outstanding talent. Therefore, I feel it is necessary to explain our story, so that users and potential candidates can make informed judgments about our company and products.
Since Elon Musk started working on humanoid robots, this field has gained significant momentum and gradually gained acceptance. There’s no need to say much more about that.
However, the journey from exploration to commercialization of humanoid robots may be more challenging and longer than anticipated.
The hardware may appear functional at first glance, but issues remain in stability, durability, and design rationality. On the software side, challenges are even greater — perception, decision-making, and motion technologies are still far from the ideal level. Practical application is difficult, and general adaptability remains insufficient.
This situation resembles the early days of computer development: the hardware existed, but without adequate software, widespread civilian and commercial use was impossible. It was only with the emergence of PCs, which reduced costs and enabled mass participation from developers, that operating systems, office software, and entertainment applications gradually emerged — ultimately leading to the broad adoption of computers.
Therefore, I believe the current humanoid robotics industry is much like the early PC industry: it must first provide developers with cost-effective and developer-friendly platforms to fully unleash their productivity, thereby rapidly advancing the entire sector. Only then can various practical robots gradually enter factories and households.
To achieve this, we committed to developing compact robots that maximize efficiency in both time and space for developers, while ensuring no compromise in performance.
Back in 2021 — unlike today — I searched extensively online but found no suitable modules. Eventually, I had to develop them myself. With no references or prior experience, every problem had to be thought through and explored independently.
We studied almost every type of reducer and motor architecture, including planetary, 3K, cycloidal, harmonic, ball screw, inner/outer rotor, axial flux, linear motors, and Halbach arrays. We developed our own reducers, motors, motor drivers, torque sensors, and torque test benches.
From a business perspective, many of my approaches were not the most prudent. I always sought breakthroughs and aimed to perfect the product, with a strong aversion to imitation. This was true when I worked in programmatic advertising, and it remains the same now in robotics—a path that has often led to detours.
To understand the technology deeply, I watched almost every relevant video available on YouTube — from reducers and structural design to motors and hydraulics; from biological structures and motion principles to motion control and perception planning. To validate various innovative ideas, we built a factory, experimented with diverse materials and processes, and explored each one extensively.
To create a high-performance robotic body, we studied various joint structures: series, parallel, direct-drive, remote transmission, SEA (Series Elastic Actuators), PEA (Parallel Elastic Actuators), pump-driven, valve-controlled, hydrostatic transmission, cable-driven, and even flexible shaft-driven systems.
We developed over 10 distinct robotic prototypes with different architectures.

We have designed at least four distinct types of small-sized robots:

In robotics, we started from knowing nothing and have now developed comprehensive R&D capabilities and a deep understanding of servo motors and reducers, leading to the creation of advanced modular products. We have also gained extensive insight into robotic structures, particularly joint mechanisms, allowing us to easily evaluate the strengths and weaknesses of various designs, apply them flexibly, and operate with growing mastery. This progress is the result of our persistent investment and accumulation in research and development.
After experimenting with various robot body structures, we found that the serial structure is actually most suitable for our current development needs. This is because most simulation environments and algorithms do not support parallel structures, and the serial structure works extremely well as long as the motors are of sufficient quality. Therefore, our mass-produced robot model for developers features a 12-degree-of-freedom (12-DOF) serial leg structure.

To create the lightest possible robot, we have invested significant effort in developing suitable modules.
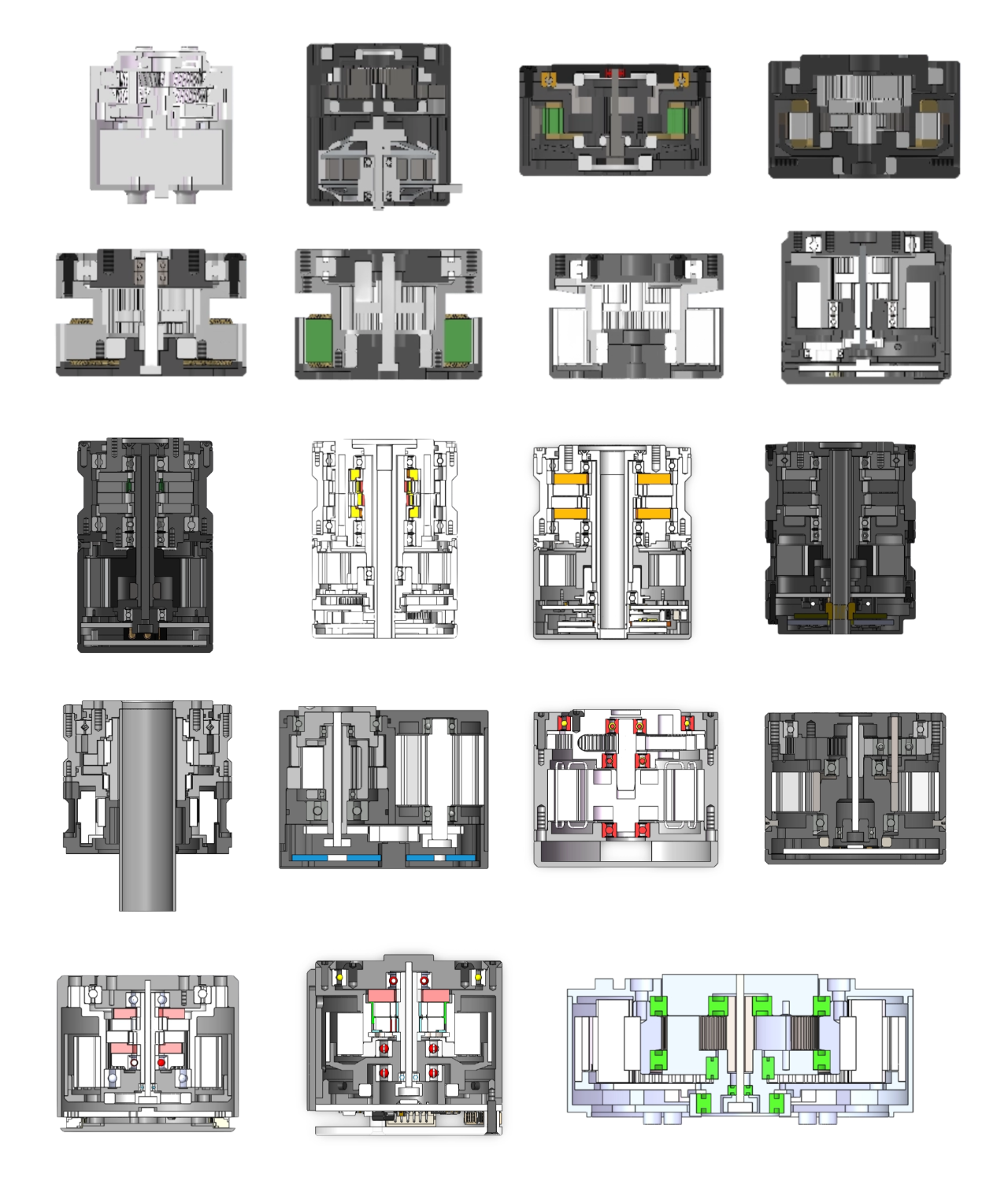
During a robot's walking process, its leg motors and structure are subjected to continuous impacts—this is more severe for bipedal robots than for quadrupedal ones. Therefore, there are extremely high requirements for the impact resistance of the motors and structure. To address this, we have conducted dozens of rounds of optimization on the motors, and the number of damaged robots and motors is countless!


In the early days, there were wires hanging everywhere, circuit boards exposed outside, and disconnections or burned components were common. Now, everything has been organized: the wiring is highly neat, and all interfaces have been integrated onto the backplane.



Now we have developed batteries with BMS control, which are convenient and safe.

Additionally, to facilitate developers, we have open-sourced multiple sets of mainstream algorithms. On the operating system, we have set up a ready-to-use development and deployment environment, with our pre-tested and optimized algorithms built-in. This design aims to achieve an out-of-the-box experience and enable rapid development for users.
Attached is the open-source link:
https://github.com/HighTorque-Robotics/livelybot_control
https://github.com/HighTorque-Robotics/livelybot_dynamic_control